MIT researchers create a “blind” robot that can climb stairs and step over obstacles
09/11/2018 / By Rhonda Johansson
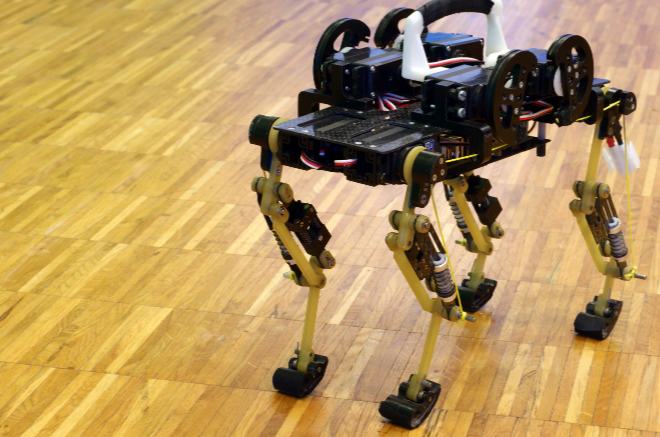
Engineers at the Massachusetts Institute of Technology (MIT) have developed two new algorithms that have spawned the creation of the “blind” Cheetah 3. The 90-pound mechanical beast is capable of leaping, galloping, and maneuvering around rough terrain and messy environments using only its sense of touch. Essentially blind, Cheetah 3 displays an astonishing range of motion, from being able to stretch backward and forward to twisting from side to side to even quickly recovering its balance when suddenly shoved or yanked.
Its ability to “feel” its way through its surroundings makes it more efficient at “seeing,” strangely enough. As explained by Sangbae Kim, associate professor of mechanical engineering at MIT, vision is often “noisy, slightly inaccurate, and sometimes not available.”
“We want the robot to rely more on tactile information. That way, it can handle unexpected obstacles while moving fast,” he said.
Cheetah 3 is more agile than its predecessor, Cheetah 2, thanks to two new algorithms designed by the engineers. Kim’s team wanted Cheetah 3 to potentially be used to carry out tasks that would otherwise be too dangerous or inaccessible for humans. The new robot had to be able to make split-second decisions on how to move based on the environment it was in. In order to properly do this, Cheetah 3 was fitted with a contact detection and model-predictive control algorithm.
The contact detection algorithm determined if Cheetah 3 would switch from stepping on the ground to swinging in the air. For example, if the robot stepped on a light twig instead of a hard, heavy rock, it would determine if it could carry on with a step or pull back and swing its leg.
“The algorithm is really about, ‘When is a safe time to commit my footstep?’” explained Kim.
The model-predictive control algorithm, on the other hand, predicts how much force a given leg has to apply once Cheetah 3 has committed to a certain step. As the name implies, this algorithm immediately calculates the multiplicative positions of Cheetah 3’s body and legs around a half-second into the future, determining a certain force by any given leg as it makes contact with the ground.
Cheetah 3 is able to make these calculations for each leg every 50 milliseconds or 20 times per second. These calculations are needed to protect the robot from sudden, unexpected forces. The MIT engineers found that the model-predictive algorithm enables the robot to quickly produce counter-forces to regain its balance should it encounter anything unusual.
Researchers describe Cheetah 3’s movement as one of “blind locomotion” — similar to making your way around a pitch-black room. There are suggestions of outfitting the robot with cameras in the near future to help it map out its general surroundings and give Cheetah 3 a visual heads-up on larger obstacles such as walls and doors. However, the team said that they are much more focused on further improving Cheetah 3’s blind locomotion.
Dog-sized Cheetah as a potential first responder
All three generations of the Cheetah were developed as a viable option for robots to work in compromised emergency response environments. In a statement to the press, Kim has said that he has high hopes for Cheetah 3, saying that the mechanical beast has a “greater payload capability, wider range of motion, and a dexterous gripping function.”
Other uses for the Cheetah are already being considered. The Biomimetic Robotics Lab in MIT has made a smaller, stripped-down version, called the Mini Cheetah which was designed for basic robotics research and education. The Mini Cheetah is also being seen as a potential technology to address certain mobility challenges among the elderly and disabled.
Read more fascinating technological developments at Robotics.news.
Sources include:
Tagged Under: blind robot, Cheetah 3, emergency responders, emergency robots, first responders, future science, future tech, inventions, new technologies, research, robotics, robots, technology
RECENT NEWS & ARTICLES