New fabrication process creates millimeter-sized soft robot that looks like a spider
11/01/2018 / By Edsel Cook

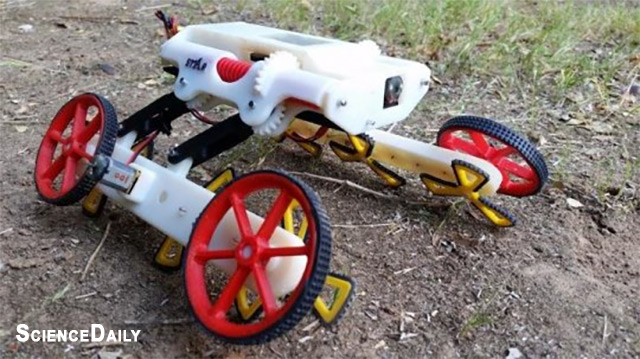
Imagine a robot with a soft body that is shaped like a spider and is no bigger than a penny. That is what a Harvard-led team of researchers has produced using a new manufacturing method that can build millimeter-scale soft robots, an article in Science Daily stated.
The researchers believe that soft robots wearing the shapes of animals could be sent to areas that cannot be accessed by humans or conventional robots with rigid bodies. These locations include the internals of the human body, spaces that are too cramped and chaotic for the unyielding frames of rigid robots, or highly unsafe for humans.
The previous limit on the size of soft robots was centimeter-scale. It was not possible to build anything smaller, not without sacrificing the flexibility and multiple functions that define a soft robot.
A research team from two Harvard-run engineering schools and Boston University (BU) came up with a means of designing and building millimeter-sized soft robots with somewhat larger micrometer-scale traits. They used their new fabrication method to make a robot based off the tiny and colorful Australian peacock spider (Maratus volans).
The soft robot spider is made from elastic material. The material can be shaped, allows movement, and is brightly colored. (Related: Startup company opens first restaurant that uses a transparent robot to serve the “world’s freshest cheeseburger”.)
Making millimeter-sized soft robot spiders from silicone
BU researcher Dr. Sheila Russo said that small robots are very simple devices. Most of them are limited to a single degree of movement. They can only serve as an actuator for one specific shape or type of activity.
“In the realm of soft robotic devices, this new fabrication approach can pave the way towards achieving similar levels of complexity and functionality on this small scale as those exhibited by their rigid counterparts,” explained Robert Wood, Ph.D., who served as the co-author of the study. “In the future, it can also help us emulate and understand structure-function relationships in small animals much better than rigid robots can.”
He and his Harvard-BU team called their new soft robots Microfluidic Origami for Reconfigurable Pneumatic/Hydrolic (MORPH) machines. The soft bodies of the robots were comprised of a dozen layers of elastic silicone.
Each layer was produced using a soft lithography technique. A network of hollow microfluidic channels was integrated into the layer, which was then cut out of its mold by a laser. The individual layers were then bonded together to make the structure of the soft robot.
Tiny medical robots may one day explore the bodies of patients
Next, the researchers employed a technique called injection-induced self-folding. An externally-applied curable resin pressurized one set of the microfluidic channels. The pressure caused local parts of the silicone layers to assume their final shape.
When the resin hardened, it locked the silicone into shape. This allowed the robot to retain its physical softness while also maintaining a rigid shape.
“We can precisely control this origami-like folding process by varying the thickness and relative consistency of the silicone material adjacent to the channels across different layers or by laser-cutting at different distances from the channels,” said corresponding author Dr. Tommaso Ranzani.
The rest of the microfluidic channels fulfilled different roles. Some were used as actuators that could move the leg structures of the spider robot to simulate walking motions. Others copied the colorful patterns of peacock spiders by pumping colored liquids through the eyes and abdomen of the spider robot.
Robotic experts believe that the MORPH process could benefit medical robots in the near-future. They suggest that small and flexible robots could crawl into the human body to support medical operations such as endoscopy and microsurgery.
You can find more big stories about tiny robots at Robotics.news.
Sources include:
Tagged Under: medical robots, robot technology, robots, Soft Robotics, soft robots, spider, spiders, technology